
Jonathan Afzali
Mechanical Engineer

Torque Vectoring Control System | FSAE
Pictured is the fully rendered modeled of the Electric Vehicle design for FSAE at UCR. I led in the research and design of the Torque Vectoring Control System sub-team. The idea behind the torque vectoring system is to optimize the torque on each individual wheel in order to optimize the drivers control on the track to create a 1:1 experience for the driver around every turn. An early model of this is pictured below the vehicle.
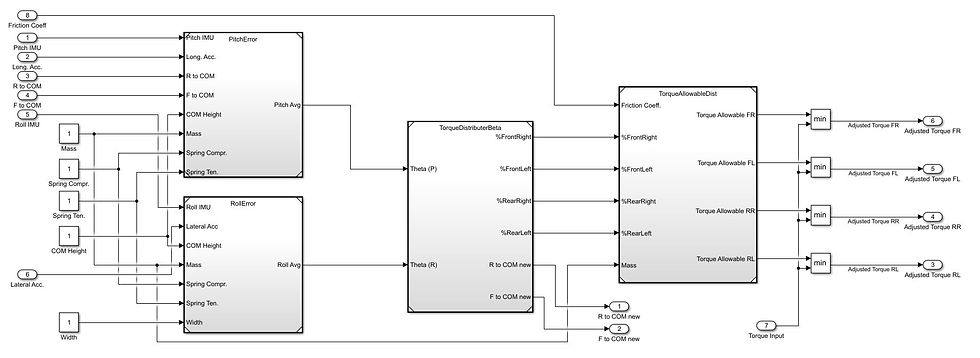
From our research, it was found that using a weight based system would allow the car to be as costly and mechanically efficient as possible. The chosen concept was a system that used the steering input and speed to calculate the shifting weight, which then allowed us to judge which tire required more torque. The determined factors and variables were then quantified and modeled using Simulink, with each input and output being accessible and easily testable.
Following this iterative process, the model was converted into C++ Arm for the use of the Vehicle Control Unit. This implementation was then tested on a fully functioning remote controlled car, with the test conditions varying from best to worst case scenarios, and each iteration improving the control system to account for new variables.